

TP pendules
Ce TP aborde l'étude de deux oscillateurs mécaniques : le pendule élastique et le pendule simple.
Vous ferez l'acquisition des oscillations d'un pendule élastique grâce à un smartphone et au logiciel phyphox™, ce qui permettra de mesurer très précisément les caractéristiques du pendule.
Quant au pendule simple, l'étude de sa période nous permettra de mesurer le champ de pesanteur et d'illustrer un effet non linéaire.
Oscillations verticales d'un pendule élastique
Théorie du pendule élastique
Le pendule élastique est constitué par un ressort de masse négligeable dont une extrémité est fixe, et l'autre liée à une masse \(m\) libre de se mouvoir. Ici on se restreint à l'étude d'un pendule élastique vertical. Rappelons que lorsque l'on allonge ou comprime un ressort celui-ci exerce une force de rappel, dite tension élastique, donnée par la loi de Hooke :
\begin{equation} \overrightarrow{T}=-k(\ell-\ell_0)\,\overrightarrow{u}\quad \heartsuit \end{equation}Relation dans laquelle \(\ell\) est la longueur du ressort, \(\ell_0\) la longueur à vide, et \(k\) la constante de raideur du ressort exprimée en N.m-1.

Ainsi, lorsque l'on fixe une masse \(m\) à un ressort vertical, celui-ci s'allonge. À l'équilibre, sa longueur est le résultat d'une compétition entre le poids et la force de rappel élastique. On a
\begin{equation} mg=k(\ell_\text{eq}-\ell_0) \label{eq:tp_pendules_1} \end{equation}Lorsque la masse s'écarte de la position d'équilibre, il subit une résultante des forces \[ \overrightarrow{F}=mg\, \overrightarrow{u_x}-k(\ell-\ell_0)\, \overrightarrow{u_x} \] En vertu du principe fondamental de la dynamique, cette force induit une accélération \(\overrightarrow{a}=\overrightarrow{F}/m\). Si on désigne par \(x(t)\) le déplacement de M par rapport à l'équilibre, on a \begin{equation} m\, \ddot x=mg-k(\ell-\ell_0) \label{eq:tp_pendules_2} \end{equation}
En additionnant les relations \eqref{eq:tp_pendules_1} et \eqref{eq:tp_pendules_2}, on obtient \[ m \ddot x=-k(\ell-\ell_\text{eq})=-kx \] Finalement, l'élongation \(x(t)\) du pendule élastique obéit à l'équation différentielle :
\begin{equation} \ddot{x}+{\omega_0}^2 x=0 \quad\text{avec}\quad \omega_{0}=\sqrt{\frac{k}{m}} \quad[\mathrm{rad.s^{-1}}] \quad \heartsuit \label{eq:tp_pendules_3} \end{equation}
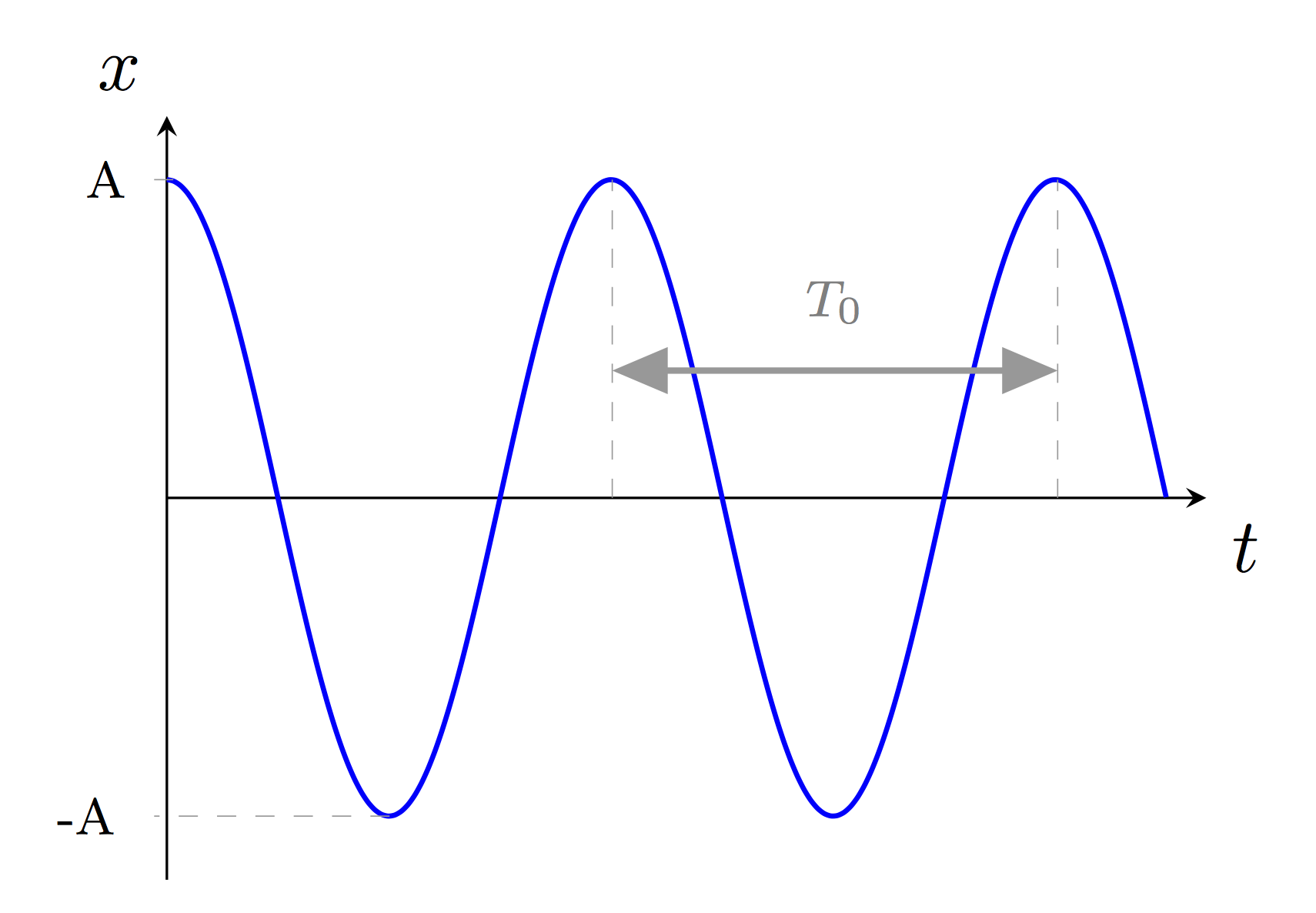
Il s'agit de l'équation caractéristique d'un oscillateur harmonique. La solution de cette équation différentielle s'écrit \[ x(t)=A\cos\left(\omega_{0}t+\varphi\right) \] Avec \(A\) et \(\varphi\), deux constantes d'intégration qui dépendent des conditions initiales. Comme l'illustre la figure ci-contre, le système se met à osciller indéfiniment avec une amplitude \(A\). Ces oscillations étant périodiques, on définit la période \(T_0\) (en s) et la fréquence \(f_0\) (en Hz) des oscillations : \begin{equation} \boxed{T_0 = \dfrac{2\pi}{\omega_0} = 2\pi \, \sqrt{\dfrac{m}{k}}}\quad \heartsuit \hspace{2cm} \boxed{f_0 = \dfrac{\omega_0}{2\pi} = \dfrac{1}{T_0} = \dfrac{1}{2\pi}\sqrt{\dfrac{k}{m}}}\quad \heartsuit \end{equation} On notera que la fréquence propre dépend des caractéristiques du pendule élastique (\(k\) et \(m\)) mais non de l'amplitude des oscillations : on parle d'isochronisme des oscillations.
Dispositif expérimental
Le dispositif expérimental se résume à :
- une potence à laquelle on fixera un ressort de constante de raideur \(k\) inconnue ;
- un smartphone muni de l'application phyphox™ pour l'acquisition de l'accélération du smartphone ;
- un support dans lequel on logera le smartphone, et qui sera fixé à l'extrémité du ressort ;
- un PC équipé du logiciel Regressi™ pour le traitement des données.
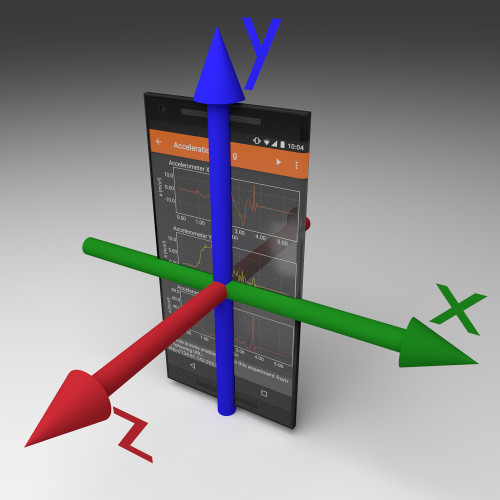
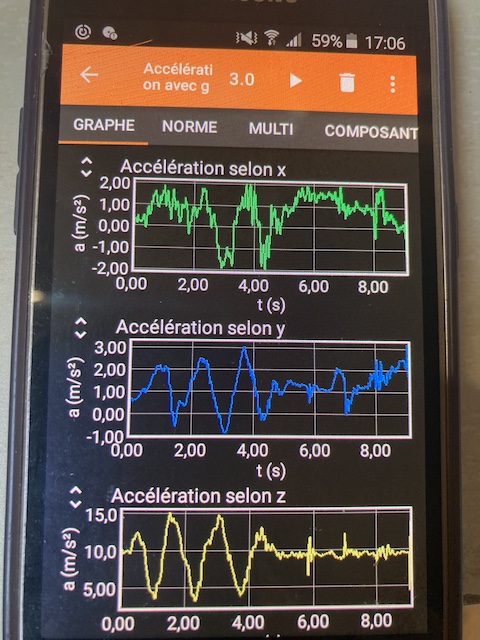
De nos jours, les smartphones sont devenus un concentré de capteurs ce qui en font de véritables mini-laboratoires mobiles. Dans ce TP, on utilise l'accéléromètre d'un smartphone afin d'étudier le mouvement du pendule élastique. Le logiciel phyphox™ permet de récupérer les trois accélérations suivant les trois axes liés au smartphone. Pour ce TP, on s'intéressera à l'accélération suivant x.


À préparer :
Sur votre smartphone téléchargez l'application gratuite phyphox™ et découvrez -la. Plus d'informations sur celle-ci ici : https://phyphox.org.
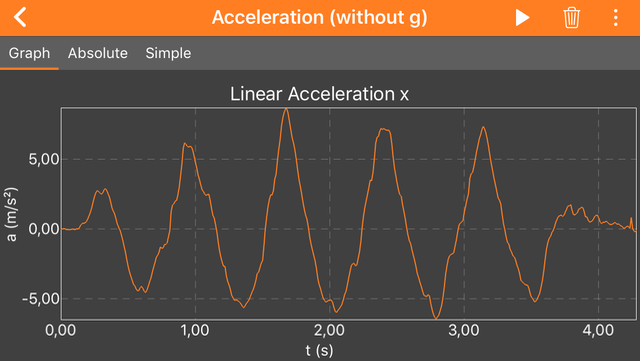
Une fois fixé au ressort, puis mis en mouvement vertical, le smartphone acquiert une accélération \(a_x=\ddot x\). Si l'on dérive deux fois de suite la relation \eqref{eq:tp_pendules_3} par rapport au temps, on obtient : \begin{equation} \ddot{a_x}+{\omega_0}^2 a_x=0 \quad\text{avec}\quad \omega_{0}=\sqrt{\frac{k}{m}} \quad[\mathrm{rad.s^{-1}}] \label{eq:tp_pendules_7} \end{equation} L'accélération obéit à la même équation différentielle que l'élongation. Autrement dit, l'accélération oscille de façon harmonique à la fréquence \(f_0\).
Mesure statique de la raideur \(k\)
L'objectif est d'estimer la raideur du ressort en observant son allongement lorsqu'on y accroche une masse. Il s'agit d'une mesure statique.
- \(\spadesuit\) Mesurer la longueur à vide \(\ell_0\pm \Delta \ell_0\) du pendule élastique.
- \(\spadesuit\) Placer le smartphone dans son support puis mesurer la masse \(m\pm \Delta m\) de l'ensemble. Fixer l'ensemble au ressort.
- \(\spadesuit\) Une fois l'équilibre atteint, mesurer la longueur \(\ell_\text{eq}\pm \Delta \ell_\text{eq}\) du ressort.
- \(\spadesuit\) En déduire la valeur de la constante de raideur du ressort (ne pas oublier de propager les incertitudes).
Mesure dynamique de la raideur \(k\)
On cherche maintenant à vérifier que la dynamique du pendule correspond bien à celle d'un oscillateur harmonique régi par l'équation différentielle \eqref{eq:tp_pendules_3}. En prime, on accèdera à une valeur très précise de la pulsation propre \(\omega_0\).
Vous utiliserez de préférence votre smartphone pour réaliser cette expérience, mais l'école en possède un si nécessaire.
(cliquez pour agrandir)
Les photos ci-dessus peuvent être différentes sur votre appareil, cela dépend du type de smartphone et de l'âge de celui-ci.
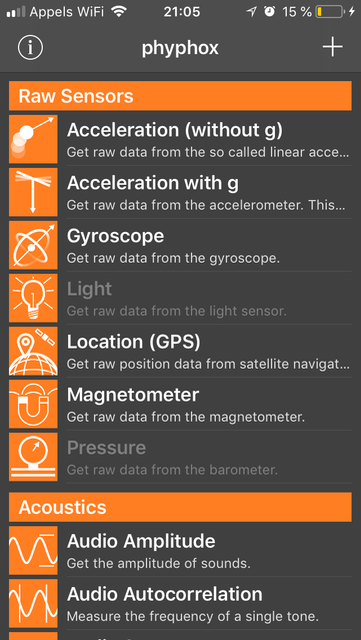
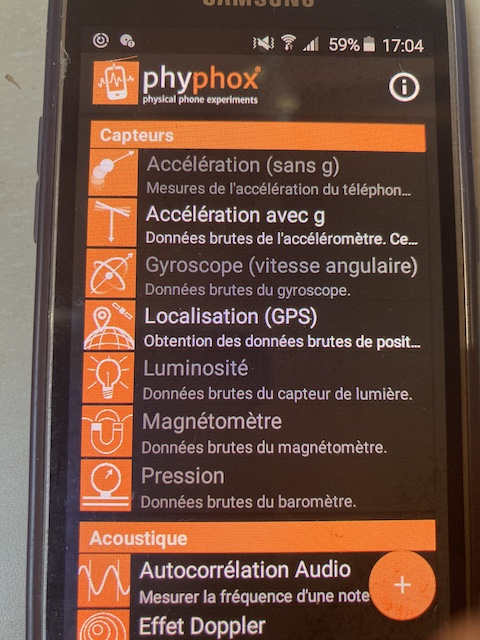
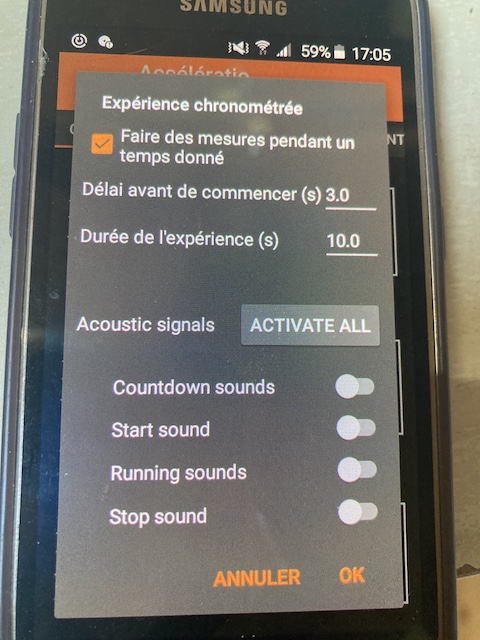
- Ouvrir l'application phyphox™ sur le smartphone. Choisir
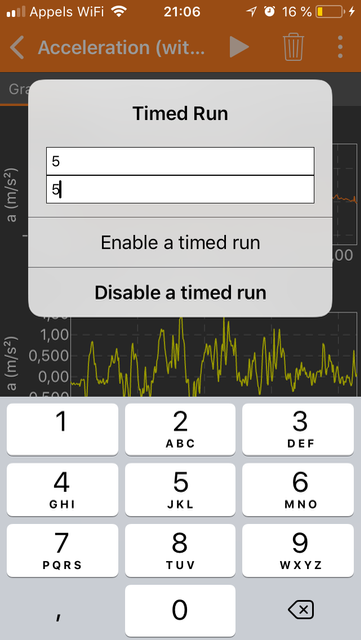
Acceleration sans gsi disponible sinon "avec g", puis aller dans le menu et toucherDéfinir le temps de mesure. Choisir un délai de 5 s et une durée de l'expérience de 5 s. - Fixer le support et son smartphone au ressort et immobiliser l'ensemble. Lancer ensuite l'acquisition : vous avez 5 secondes pour écarter légèrement le pendule et lâcher. L'appareil enregistre alors les accélérations suivant les trois directions cartésiennes au cours du temps ceci pendant 5 secondes.
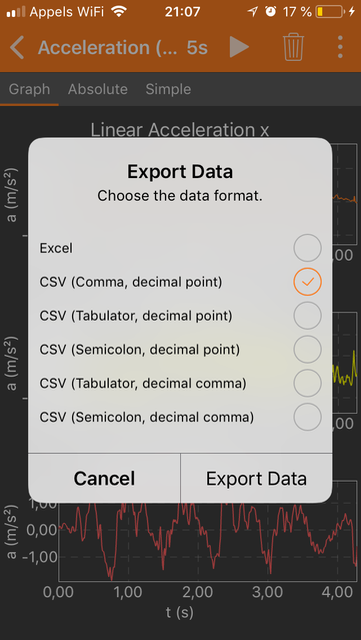
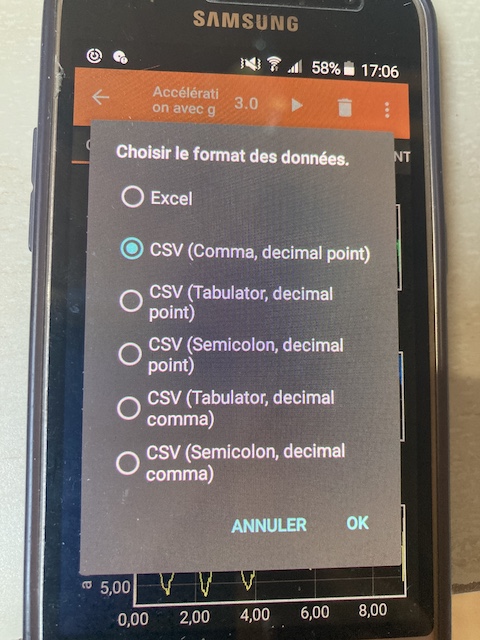
- Une fois l'enregistrement terminé, il suffit d'exporter les données depuis le menu (
Export Data►CSV (Coma, decimal point)) par mail. - Récupérer le fichier sur le PC (accéder aux mails via l'ENT) puis l'enregistrer dans un dossier.
- Lancer Regressi™ puis ouvrir le fichier CSV. Un tableau de mesures apparaît. Commencer par éliminer ce qui ne nous intéresse pas : supprimer les colonnes associées aux accélérations suivant y et z. Ensuite, remplacer les intitulés Time par t et LinearAccelerationX par X. Enfin, on rajoutera une incertitude sur la colonne X, on saisira directement une incertitude à 68% de 0,03 $\mathrm{m.s^{-2}}$. Pour le temps, on prendra une incertitude nulle.
- \(\spadesuit\) Tracer X en fonction du temps t. À l'aide des outils de Regressi™, mesurer la période des oscillations. En déduire une estimation de la pulsation propre \(\omega_0\).
- \(\spadesuit\) Modélisation : Regressi™ permet d'ajuster une équation différentielle à un ensemble de points expérimentaux. Dans la fenêtre de modélisation, taper le modèle suivant :
\[
X^{\prime\prime} (t)=-a\times X
\]
où \(a\) est un paramètre à ajuster. Cliquer sur
Ajuster. Il se peut que le logiciel ne réussisse pas à procéder à l'ajustement. Il faut dans ce cas donner au paramètre \(a\) une valeur proche de la valeur optimale. Utiliser l'estimation de la pulsation propre pour renseigner correctement la valeur du paramètre, puis ajuster. Le logiciel trace une sinusoïde qui doit très bien s'ajuster aux données expérimentales. Imprimer (courbe et modélisation). - \(\spadesuit\) À partir des résultats de la modélisation, en déduire la valeur de la constante de raideur. Y-a-t-il adéquation avec la valeur obtenue par une mesure statique ? Discuter.
Influence des frottements
Sur une période d'acquisition plus longue, on peut mettre en évidence le phénomène d'amortissement.
- Recommencer le travail précédent en changeant le temps d'acquisition : choisir une durée qui permet de bien observer la décroissance exponentielle de oscillations (cette durée dépend de la raideur du ressort).
Pour la modélisation, il faut ajouter un ingrédient qui a été négligé jusqu'ici : l'influence des frottements. Durant son mouvement, la masse \(m\) subit une force de frottement de la part de l'air. Cette force est d'autant plus élevée que la vitesse est importante. Pour simplifier, nous considérerons qu'elle est proportionnelle à la vitesse : \(\overrightarrow{f}=-\alpha \overrightarrow{v}\). En reportant cette force dans le bilan des forces, on aboutit à une nouvelle équation différentielle : \begin{equation} \ddot x+2\lambda\, \dot x+{\omega_0}^2\, x=0 \label{eq:tp_pendules_4} \end{equation}
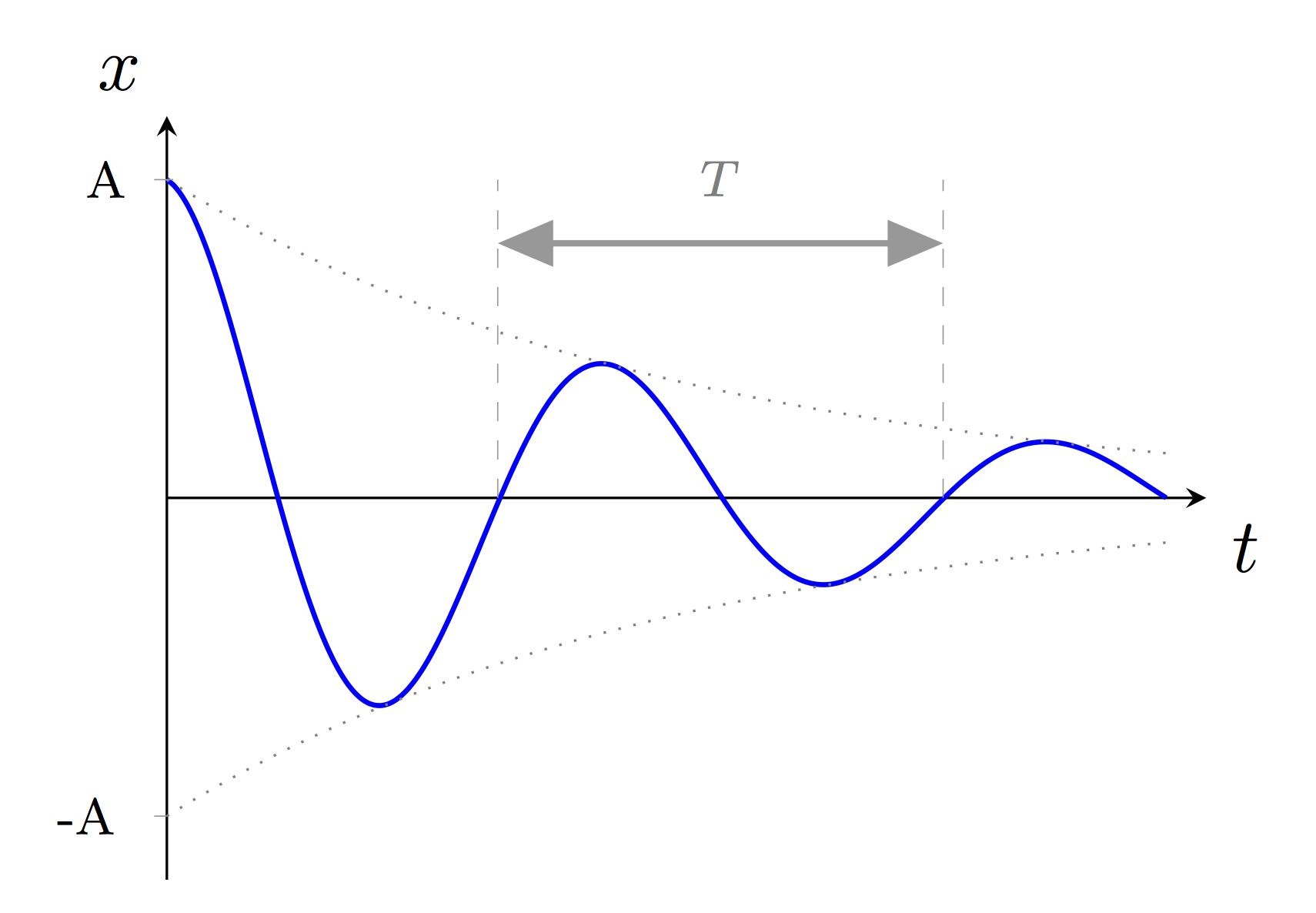
où le coefficient \(\lambda\) est une constante appelée coefficient d'amortissement. Si ce dernier n'est pas trop élevé (ce qui est le cas ici), on observe des oscillations dont l'amplitude s'amortit exponentiellement au cours du temps. On parle d'oscillations pseudo-périodiques.
Mathématiquement, on a \begin{equation} x(t) = A e^{-\lambda\,t} \cos (\omega t + \phi) \label{eq:tp_pendules_8} \end{equation} avec \(\omega=\sqrt{{\omega_0}^2-\lambda^2}\). Comme on le voit, la durée d'une oscillation (pseudo-période \(T=2\pi/\omega\)) augmente avec le coefficient d'amortissement.
À préparer :
- Si le mouvement du pendule est régit par l'équation \eqref{eq:tp_pendules_4}, quelle est alors l'équation différentielle dont est solution l'accélération verticale \(a_x=\ddot x\) ?
- On note \(\tau_{1/2}\) le temps au bout duquel l'amplitude des oscillations amorties est divisée par deux. À partir de \eqref{eq:tp_pendules_8}, montrer que \[\tau_{1/2}=\dfrac{\ln 2}{\lambda}\]
- \(\spadesuit\) En combien de temps l'amplitude des oscillations est divisé par deux ?
- \(\spadesuit\) Modélisation : proposer un modèle d'équation différentielle.
En déduire le coefficient d'amortissement \(\lambda.\) - \(\spadesuit\) A partir des résultats de la modélisation, en déduire une nouvelle valeur pour la constante de raideur et son incertitude à 95%. Celle-ci est-elle plus en accord avec la valeur statique?
Le pendule simple
Théorie du pendule simple
Le pendule simple étudié est formé par :
- un fil inextensible de masse négligeable et de longueur \(\ell\) ;
- et une bille de masse \(m\) accrochée à l'extrémité du fil.
Si on écarte le pendule d'un angle \(\theta_0\) par rapport à la verticale et qu'on lâche le pendule, celui-ci se met à osciller. Déterminons l'équation vérifiée par l’angle \(\theta(t)\) que fait le fil avec la position verticale à l'instant \(t\).
Pour cela faisons quelques hypothèses simples :
- Le référentiel du laboratoire est supposé galiléen ;
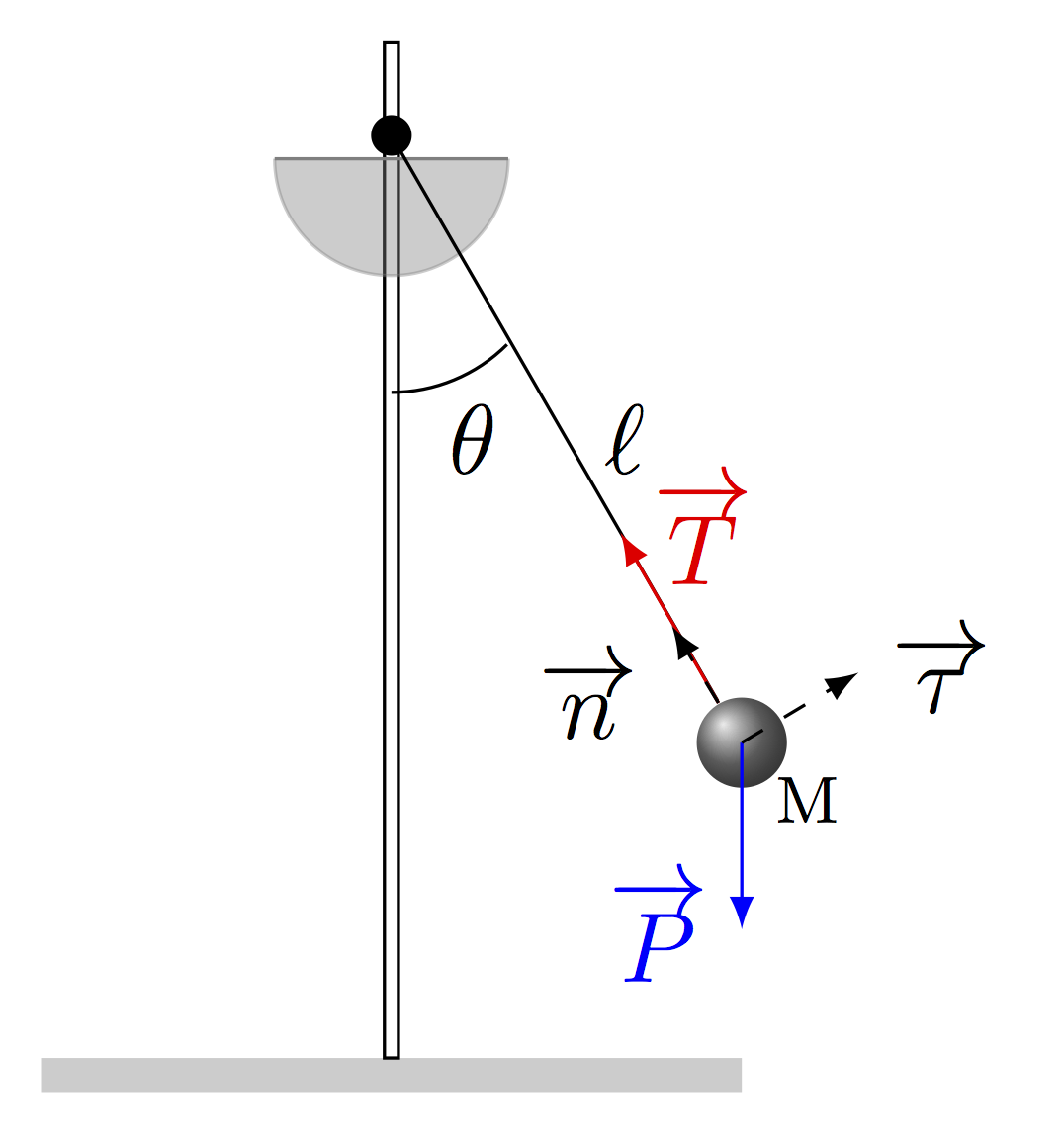
- On assimile la bille à un point matériel M qui ne subit que deux forces : le poids \(\overrightarrow{P}=m \overrightarrow{g}\) et la tension du fil \(\overrightarrow{T}\).
En vertu du principe fondamental de la dynamique, on a \begin{equation}\overrightarrow{P}+\overrightarrow{T}=m\,\overrightarrow{a}\end{equation} Dans la base de Frenet (formée d'un vecteur tangentiel \(\overrightarrow{\tau}\) dirigé dans le sens du mouvement et d'un vecteur normal \(\overrightarrow{n}\) dirigé vers le point de suspension du pendule), les vecteurs vitesse et accélération s'écrivent \[ \overrightarrow{v}=\ell \dot \theta \, \overrightarrow{\tau} \quad\text{et}\quad \overrightarrow{a}=\frac{\mathrm{d}v}{\mathrm{d} t}\overrightarrow{\tau}+\frac{v^2}{\ell}\overrightarrow{n} \] Projetons maintenant le PFD dans la base de Frenet : \begin{align} &\text{sur} \overrightarrow{\tau} \text{: } \quad m\,\ell\,\overset{\centerdot\centerdot}{\theta} = - m\,g\,\sin \theta \label{equadiff} \\ &\text{sur} \overrightarrow{n} \text{: } \quad m\,\ell\,\overset{\centerdot}{\theta}^2 = T - m\,g\,\cos \theta \label{tension}\end{align}
L’équation \eqref{tension} nous permet d’obtenir la tension du fil, tandis que l’équation \eqref{equadiff} nous donne l’équation différentielle du mouvement : \begin{equation} \boxed{\ddot{\theta} + {\omega_0}^2\, \sin \theta = 0 \quad\text{avec}\quad {\omega_0}^2=\dfrac{g}{\ell}} \quad \heartsuit \label{eq:tp_pendules_5}\end{equation}
Le terme en \(\sin\theta\), rend cette équation différentielle non linéaire.
Cas des petits angles
Pour de petites oscillations, on peut assimiler \(\sin \theta\) à \(\theta\). L’équation différentielle devient alors \begin{equation} \ddot \theta + \omega_0^2\, \theta = 0 \end{equation} On reconnaît l'équation différentielle de l'oscillateur harmonique que l'on a déjà rencontré dans l'étude du pendule élastique. On sait donc que la solution est du type \(\theta(t) = \theta_0 \, \cos(\omega_0 t)\) : le pendule oscille de façon périodique avec une période propre
\begin{equation} T_0 = \dfrac{2\pi}{\omega_0}=2\pi\sqrt{\frac{\ell}{g}}\quad \heartsuit \label{eq:tp_pendules_6} \end{equation}
Remarque
Dans la pratique, les oscillations sont légèrement amorties par les frottements de l’air, que nous négligeons ici.
Cas des grands angles
Pour des oscillations de grande amplitude, le comportement s'écarte de l'oscillateur harmonique à cause de la présence du terme non linéaire (\(\sin\theta\)). De ce fait, les oscillations ne sont plus sinusoïdales et la période de celles-ci dépend de l'amplitude \(\theta_0\). La formule de Borda est une formule approximative qui donne la période des oscillations pour des amplitudes ne dépassant pas les \(60^{\circ}\) :
\begin{equation} T = T_0 \left(1 + \dfrac{\theta_0^2}{16}\right)\quad\text{avec}\;\theta_0\;\text{en radian} \label{borda} \end{equation}Dispositif expérimental

(cliquez pour agrandir)
Le pendule est constitué par une bille d'acier suspendue à un grand fil. Une barrière chronométrique est disposée à l’aplomb du pendule lorsque celui-ci est à l’équilibre. Un carton gradué permet de repérer l’angle initial \(\theta_0\) des oscillations.
Attention, la barrière chronométrique donne accès à la valeur d'une demie période, car le chronomètre se déclenche au premier passage puis s’arrête au deuxième passage au niveau du faisceau.
Attention
Afin d'obtenir de bons résultats, attirons votre attention sur les deux points suivants.
- Pour une meilleure précision, le faisceau IR de la barrière optique doit être coupé par le fil et non la bille !
- Le réglage de la position de la barrière chronométrique au niveau de la position d’équilibre du pendule est capital. Aussi pour palier à un léger biais, on mesure deux fois la demie période : en écartant initialement le pendule à droite de la barrière, puis en l’écartant à gauche.
1ère mesure de g
A préparer : nous utilisons un logiciel (Regressi™) pour effectuer une analyse statistique d'une série de mesures. Toutefois, il convient de savoir faire ces calculs à la main.
Voici une série de mesures obtenue pour \(T\) :
2,832 ; 2,815 ; 2,863 ; 2,859 ; 2,842
Effectuer le traitement statistique (incertitude de type A à l'aide de la méthode de Student, voir Formulaire sur le site internet) et donner la valeur de l'incertitude à 95% sur la mesure de \(T\).
- \(\spadesuit\) Noter la longueur du pendule indiquée sur la paillasse ;
- \(\spadesuit\) Mesurer pour un angle initial de 10°, la demi-période à gauche (\(T_1\)), et à droite (\(T_2\)). Répéter 5 fois la procédure.
- Rentrer les mesures \(T_1\) et \(T_2\) dans Regressi™, puis créer la grandeur \(T=T_1+T_2\).
- Se rendre dans le menu Statistique. Dans
Optionchoisir la grandeur \(T\) puis demander d'afficher (cliquez sur l'onglet tableau) la moyenne et l'intervalle de confiance sur la moyenne à 95% de niveau de confiance (ICM95%).
\(\spadesuit\) Noter, l'écart type des mesures \(u\), la moyenne arithmétique et son incertitude à 95%nc (notée U(m,95%)). - On donne l'incertitude à 68% sur la mesure de la longueur : \(u_{\ell} = 5 \times 10^{-3}\,\mathrm{m}\).
\(\spadesuit\) A partir des deux questions précédentes, calculer la valeur du champ de pesanteur \(g\pm U_g\) à 95% de niveau de confiance. Les tables indiquent \(g=9,81\,\mathrm{m.s^{-2}}\) à Rennes. Discuter.
Vérification de la loi de Borda
Ici, nous testons l’évolution de la période \(T\) en fonction de l’angle initial \(\theta_0\) des oscillations.
- \(\spadesuit\) Mesurer \(T_1\) et \(T_2\) pour différentes valeurs de \(\theta_0\), allant de 10° jusqu'à 25° (par sauts de 2,5°). Rentrer les mesures dans Regressi™ puis créer la grandeur \(T\).
- Renseigner l'incertitude-type de \(T\) à partir du \(u\) déterminée à la manipulation précédente (il faut au préalable figer la grandeur \(T\) en faisant un double clic sur l'entête de \(T\)). Rentrer également l’incertitude sur \(\theta_0\) qui est donnée : \(u(\theta_0) = 0,5\)°.
- Créer la grandeur \(X=\theta_0^2\) où \(\theta_0\) est exprimée en radian. Tracer ensuite \(T\) en fonction de \(X\). On fera apparaître les incertitudes à 95% (voir options) et on ajustera judicieusement l'échelle des ordonnées.
- Modélisation : dans la fenêtre de modélisation, entrer la relation \(T=a \times (1+X/16)\) puis ajuster.
- \(\spadesuit\) La loi de Borda est-elle vérifiée ? Déduire de la modélisation une valeur de la période propre \(T_0\) du pendule et son incertitude. Comparer avec celle trouvée à la question 2.3.4 Commenter.
- En déduire une nouvelle valeur de \(g\pm U_g\). Le résultat est-il plus précis ?
Fiche de résultats
Rendez-vous sur votre espace LabNbook pour transmettre vos résultats.
Matériel
- Un smartphone équipé de l'application Phyphox™ ;
- Un support pour smartphone ;
- Un ressort + une potence + tige de fixation ;
- Une règle gradué au millimètre ;
- Une balance (précision ± 1g)
- Un pendule simple de grande taille ;
- Une porte optique chronomètre + son alimentation électrique ;
- Un rapporteur géant ;
- Un ordinateur muni du logiciel Régressi.